고정 헤더 영역
상세 컨텐츠
본문

※자율주행 시리즈 이전 편: 자율주행의 과정 알아보기

더욱 빠르고 더욱 지능적인 자동차를 원하다
자동차라는 새로운 문명의 전환점은 인류에게 큰 진보를 가져다주었다. 1886년 칼 벤츠가 최초의 내연 자동차를 개발하고 난 이후 인류는 자동차를 어떻게 하면 더 빠르게 달릴 수 있는지, 연료의 효율을 높이는 방법은 무엇인지 연구를 해왔다. 자동차의 기계적 부품의 폭발적인 연구와 성과가 자동차의 전장화와 맞물려 자동차 산업의 기술력을 더욱 높은 수준까지 올려두었다. 그러나 사람들은 그 이상을 바라보았다. 하늘을 나는 자동차, 사람이 운전하지 않는 자동차, 아이언맨의 자비스처럼 똑똑한 자동차 등 다양한 미래 모습의 자동차를 현실에서 그리기 위해 노력해왔다.

자율주행 자동차는 사람들이 그리는 꿈의 자동차 중 하나였다. 알파고를 선두로 인공지능 열풍이 불게 된 이후, 자율 주행 자동차는 ADAS 기술과 인공지능의 발전으로 빠르게 산업을 일구어 나아갔다. 테슬라는 상용화된 자율주행 자동차 제조업체 중 하나로, 테슬라가 보여준 진보적인 인류의 미래는 사람들을 흥분시켰고, 고도의 자율주행 수준을 탑재한 자동차를 개발하고 상용화하기 위한 노력은 이제는 기업을 넘어 국가 간의 경쟁으로까지 커졌다.

자율주행하면 2000년대에 들어와 발전한 기술이라고 생각하기 마련이다. 그러나 역사를 보면 꽤 오래전부터 공학자들은 자율주행 자동차를 연구해왔음을 알 수 있다.

자율주행 자동차(Driverless Car)을 위한 연구의 시초
드라이버 리스 카(Driver less Car)를 만들기 위한 시도는 1920년대로 거슬러 올라간다. 이 시기에 미 육군의 전기 기술사인 프란시스.P.후디나(Francis.P.Houdina)는 후디나 라디오 컨트롤(Houdina Radio Control)이라는 무선 장비 회사를 설립하고 무선으로 작동하는 자동차를 개발한다. 무선 자동차는 챈들러 모델에 송신 안테나와 소형 전기 모터를 장착한 것으로, RF 통신으로 차량의 움직임을 제어하며 주행했다.

그리고 1925년, 후디나는 무인 자동차 아메리칸 원더(American Wonder)를 발표하고 뉴욕시 거리에서 두 대의 자동차를 통신으로 연결해 브로드웨이 5번가를 따라 주행하는 시연을 성공적으로 해냈다.
바로 1년 뒤인 1926년, 자동차 유통 업체인 아헨 모터(Achen Motor)는 후디나의 무인 자동차 발명품을 사용해 팬텀 오토(Phantom Auto)라는 이름으로 밀워키 거리에서 시연을 선보이며 자율주행 자동차의 연구 시대가 시작되었다.

V2X 개념의 등장
이후 자율주행 자동차에 대한 여러 비전이 제시되었는데, 1939~1940년에는 자동차에 RF 통신을 탑재하는 것이 아닌, 도로에 RF 모듈을 깔고 이 모듈을 통해 제어되는 자율 주행 자동차 개념이 등장했고 노만 벨 게디스의 책, 매직 모터 웨이즈(Magic Motorways)에는 무인 차량에 대한 비전이 등장했다.

이 시기에 V2X(Vehicle to Something)의 자율주행 시스템이 제안되는데, 차량과 사물 간의 통신을 뜻하는 이 개념은 통신으로 세상이 연결되는 현시대에서 가장 중요한 기술로 자리 잡게 된다.

인프라를 활용한 자율주행 시스템
1950년대에는 인프라를 활용해 자동차를 자율적으로 주행하는 시스템이 제작되기 시작했다. 1953년 RCA 랩은 실험실 바닥에 패턴으로 놓여있는 와이어를 따라가는 소형로봇을 제작하고, 1958년에는 네브래스카 주 동부에 있는 링컨 마을 외곽의 공도 약 121m를 풀 사이즈의 모형으로 주행에 성공했다.

또한 동시대에 제너럴 모터스(GM)가 전투기에서 영감을 받아 파이어버드(Firebirds)라는 콘셉트카를 설계한다. 파이어버드는 1953년~1964년까지 총 4대로 세대가 나누어지는 콘셉트카다. 원래는 자동차의 가스 터빈 엔진을 연구하기 위한 콘셉트카였던 파이어버드는 전자 안내 시스템(Electronic Guide System)의 도입으로 큰 의미가 있게 된다.

파이어버드2는 자동차를 안내하고 사고를 피하는 데 도움이 되는 신호를 보내는 안내 시스템을 탑재했고, 파이어버드3은 크루즈 컨트롤과 ABS 시스템, 사고 방지 안내 시스템 등 자율주행의 근간을 이루는 시스템의 탑재를 통해 비록 콘셉트카지만 미래지향적인 자동차를 1950년대에 파격적으로 선보였다는 점에서 뜻깊다 할 수 있다.

통신 기반의 자율주행 시스템
1960년대는 통신으로 외부에서 정보를 받아 자동차가 주행하는 방식의 연구가 이루어졌다. 1960년 오하이오 주립 대학의 통신 및 제어 시스템 연구소가 RFID 기반의 무인 차량 개발 프로젝트를 수행하고 오하이오주와 매사추세츠주, 뉴욕주, 캘리포니아주에서 인프라가 설치된 도로 기반의 자율주행 시스템 개발하려는 시도가 있었다.

현대 자율주행 자동차의 시초
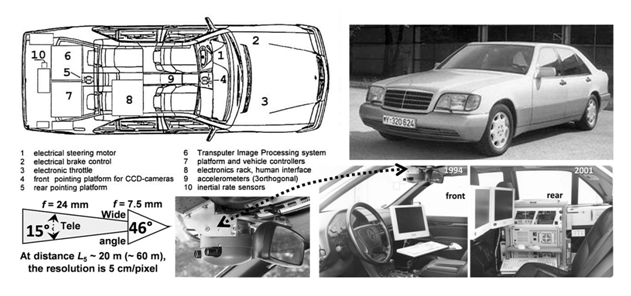
1980년대에는 드디어 현대 자율주행 자동차를 주행하는 작업을 수행하게 되는데, 이때 자율주행 연구의 개척자인 에른스트 디터 딕만스(Ernst Dieter Dickmanns)가 등장한다. 1980년대 초, 에른스트와 연구팀은 메르세데스 벤츠 밴에 카메라와 기타 센서를 장착해 영상을 실시간으로 컴퓨터가 받아 이미지 시퀀스를 기반으로 명령을 내려 스티어링 휠과 스로틀, 브레이크를 제어하는 연구에 성공한다.

교통이 통제된 환경하에서 시속 63km로 실도로 주행에 성공한 직후, 1986년 그의 팀은 스스로 운전하는 로봇 자동차 'Vamos'를 제작하고 1987년에 이 로봇 자동차는 무려 시속 96km로 자율주행을 한다. 벤츠와 에른스트가 협력한 연구는 프로메테우스 프로젝트(Prometheus project)로 발전해 많은 대학과 자동차 제조업체가 참여하여 자율 주행 자동차의 상태를 정의하는 중요한 연구를 수행하게 된다.

자율주행 자동차 연구의 급속 발전
1990년대에는 자율주행 자동차의 연구가 급속도로 이루어지고 결과물도 상당한 시기였다. 특히 미국이 이 시기에 가장 많은 연구 성과를 선보였다. 1991년 미국은 국가 자동화 고속도로 시스템에 대한 연구를 위해 6억 5천만 달러를 할당했으며, 고속도로에 내장된 자동화와 차량의 자동화 기술, 차량과 고속도로 인프라와의 협력 네트워킹을 통해 자동화된 주행을 선보였다.

같은 해 미국 의회는 '자동 주행 차량의 고속도로 주행허가'를 요청해 ISTEA 교통 허가 법안을 통과시키며 미국은 자율주행 자동차의 연구와 더불어 법규까지 제정함으로써 자율주행 연구에 몰두했다.

이후 1994년 다임러 벤츠 사와 UniBMW 사는 에른스트 연구팀의 차량인 Vamp와 Vita -2를 개발해 파리의 3차선 고속도로에서 시속 130km의 속도로 약 1,000km 이상을 반자율 주행으로 이동하는 데 성공하고, 1995년 카네기 멜런 대학은 Navlab 프로젝트를 통해 약 5,000km의 서부-동부 횡단을 수행하여 98.2%를 자율 주행으로 주행해 'No Hands Across America'를 이루어냈다.

다만, 횡 방향 제어를 하기 위해 신경망을 사용했지만 종 방향 제어는 인간이 제어했으며, 미국 도로는 미 대륙의 크기가 크기 때문에 한국처럼 도로가 복잡하지 않고 직선 차도가 길었다는 점이 있기 때문에 성공률이 가진 허점이 있었다.

ADAS 기술의 폭발적인 성장기
2000년대 이후로는 ADAS 기술이 비약적으로 성장하여 자율 주행 시스템을 더욱 견고하게 만들고 있다. 2015년 델파이는 델리 기술로 보강한 아우디를 15개 주에서 5,472km 이상 운전해 총 주행 시간의 99% 동안 99%의 자율 주행 모드를 유지하도록 개선했다.

또한, 2017년에 아우디는 A8에 아우디 AI를 사용하여 시속 60km 자율 주행 모드를 제공하는 동시에 자율주행 시스템에 카메라 및 초음파 센서 외에 레이저 스캐너를 사용하는 최초의 제조업체로 자리 잡았다. 동시에 전기 자동차 제조업체인 테슬라가 오토파일럿 기능을 탑재한 전기자동차를 상용화해 시장에 급속도로 질주했다.

2020년, 현 시기의 자율 주행 자동차는..
2020년 현재 대부분의 자동차 제조업체들은 부분 자율주행 모드를 탑재하고 있다. 대부분 레벨 2 수준으로, 레벨 3 나아가 레벨 4 상용화를 위해 전통적인 메이커들뿐만 아니라 글로벌 IT 기업들이 자율 차 개발에 참여하고 있으며, 각국에서도 자율주행 자동차를 위한 인프라 개선에 심혈을 기울이는 상황이다.

다만, '자동차는 어떻게 자율주행하는 걸까?'에 서도 살펴볼 수 있듯이 자율주행 자동차에 대한 우리나라의 준비 상황은 미비한 편이다. 레벨 4수준의 자율주행이 이루어진다면 면허가 없는 사람도 자동차를 '운행'할 수 있는 것인지에 대한 논의와 자율주행 자동차 사고가 발생하면 과실 비율을 어떻게 책정해 보험사가 보험금을 지급할지에 대한 의문이 있다.

자율주행 관련 보험 약관과 서비스 마련을 하라는 지침에도 자율주행 보험 서비스를 제공하고 있는 곳은 단 두 곳 뿐이다. 빠르면 2024년 늦어도 2030년 내에는 자율 주행 자동차가 상용화될 시점에서 사회적 논의와 법규 및 서비스의 제도 개선은 이른 시일 내에 이루어지는 것이 필요하다고 생각한다.
글:김윤경 에디터(yoonk7022@naver.com)
사진:Wikipedia, Tesla, Daimler, Audi, Ford
카테고리:자동차 역사 이야기
©오토모빌매거진.무단-전재 재배포 금지
반응형
 Copyright © rollingmagazine 2024
Copyright © rollingmagazine 2024
댓글 영역