고정 헤더 영역
상세 컨텐츠
본문

"4X4(Four by Four), 4WD, AWD"

자동차에는 4개의 바퀴가 달려있다. 일반적인 대다수의 자동차들은 2개의 바퀴로 도로를 달린다. 그러나 4륜구동은 4개의 바퀴를 모두 굴린다. 도대체 4륜구동은 어떻게 4바퀴를 굴리는 것일까?


4륜구동의 탄생
4륜구동의 역사는 무려 1893년까지 거슬러 올라간다. 당시 영국의 엔지니어였던 브라마 조셉 디플록(Bramah Joseph Diplock)은 증기 구동 트랙션 엔진을 위한 4륜구동 시스템을 특허로 출원했다. 1899년에는 독일의 페르디난트 포르셰(Ferdinand Porsche)가 세계 최초의 4륜구동 하이브리드 자동차를 개발하였다. 4륜구동 자동차의 상용화는 1903년에 이루어졌다. 네덜란드의 자동차 제조사 스파이커에서 만든 60 HP가 그 주인공이다. 스파이커 60 HP는 세계 최초의 내연기관 탑재 4륜구동 구동 자동차, 그리고 최초의 4륜구동 레이스카라는 두 가지 타이틀을 가진 자동차이다.



이후 1차, 2차 세계 대전 동안 각 나라의 군대는 거칠고 험한 전장을 누비기 위해 4륜구동 전술차량을 이용한다. 이때 등장한 차량 중 대표적인 차량이 독일의 메르세데스-벤츠 G1, L 1500 A, BMW 325, 퀴벨바겐, 일본 내연기 주식회사의 95식 4륜 자동차, 러시아의 GAZ-61, 미국의 윌리스 지프, 닷지 WC 트럭 등이 있다.



전쟁 이후 4륜구동 특유의 험로주행 능력을 바탕으로 민수시장에도 발을 들여놓았다. 가장 앞선 것은 지프의 CJ(Civilian Jeep)와 닷지의 파워 웨건 트럭이었다. 1972년에는 스바루의 레오네(Leone)가 승용 자동차에는 최초로 4륜구동을 적용하여 4륜구동 승용차의 시장을 개척했다. 본격적인 4륜구동 자동차의 대유행은 1980년대 부터 라고 할 수 있다. 아우디에서 자사의 자동차에 콰트로(Quattro)라는 이름의 4륜구동 시스템을 탑재하였고 이후 많은 자동차에서 4륜구동을 만나볼 수 있게 되었다.

4WD? AWD?
국제자동차기술자협회(SAE)의 국제 표준에 따르면 4륜구동은 크게 세 가지로 나뉜다. 1차 분류에서는 일시형 4륜구동(Part-Time AWD), 상시형 4륜구동(Full-Time AWD), 주문형 4륜구동(On-Demend AWD)으로 구분된다. 이외에도 2차 분류에 따라 일시형 비동기, 일시형 동기, 상시형 고정토크, 상시형 가변토크 등의 8개의 분류가 존재한다. 또한 각 자동차 제조사별 명칭과 분류, 동작 방식이 상이하므로 같은 방식으로 분류되었더라도 세부적인 동작 방식이나 토크 분배는 차이가 존재할 수 있다.

일시형 4륜구동(Part-Time 4WD)은 운전자의 조작에 의해 주 구동축(1st)과 부 구동축(2nd)의 연결을 잇고 끊을 수 있다. 이를 위해 과거에는 기어 레버가 존재했고 최근에는 버튼식으로 동작하는 차량도 있다. 일시형 4륜구동의 특징은 시스템에 중앙 차동 장치와 같은 장치가 존재하지 않는다는 점이다. 또한 구조적으로 간단하여 정비성이 높다. 그러나 접지력이 높은 포장노면 등에서 좁은 반경으로 선회 시 동일한 구동력이 걸리는 전/후륜의 회전 수가 같아져 타이트 코너 브레이킹 현상(Tight Corner Braking Phenomenon)이 발생하고 이는 구동계에 무리를 주게되어 손상을 입힐 수 있기 때문에 주의가 필요하다.

상시형 4륜구동(Full-Time AWD)은 말 그대로 운전자의 인위적인 조작 없이 상시로 트랜스퍼 케이스가 연결되어 항상 4륜구동으로 주행한다. 상시형 4륜구동의 특징은 속도와 노면에 관계없이 모든 바퀴에 동력이 가변적으로 혹은 고정된 값으로 분배되어 전달된다. 따라서 고속 주행에서도 4개의 바퀴에 필요에 따라 동력을 전달하고 높은 안정성을 갖는다. 다만 항상 4바퀴에 모두 동력을 전달하기 때문에 상대적으로 연비가 나쁜 편이고 트랜스퍼 케이스가 복잡하여 정비성이 떨어진다.

주문형 4륜구동(On-Demend AWD)은 E-4WD라는 명칭으로도 불린다. 앞 서 두 가지의 4륜구동 방식은 주 동력 기관에서 전달되는 출력을 트랜스퍼를 통해 전/후로 분배한다면, 주문형 4륜구동의 경우 독립적으로 구동되는 동력 시스템에 의해 부 구동축을 구동시킨다. 예를 들면 내연기관 전륜구동 자동차에 후륜에는 전기 모터를 이용한 경우가 있다. 이 경우에는 저속 구간에서는 후륜에 위치한 모터가 구동을 담당하고 중속 구간에서는 내연기관의 힘으로 구동하는 전륜을 보조하여 후륜의 모터가 구동되다가 고속 구간에서는 전륜의 내연기관 힘만으로 달리게 된다. 또한 험로에서는 4륜구동으로 동작하는 것도 가능하다. 따라서 일시형과 비슷한 방식이지만 동력을 유동적으로 사용하여 안정적인 주행을 만들어 내는 것이 가능하지만 별도의 차동 제한 장치(Limited Slip Differential)등이 존재하지 않는 한 험로 주파 능력이 상대적으로 떨어지는 편이다.




다양한 이름의 4륜구동
전 세계의 수많은 자동차 회사 만큼이나 4륜구동의 명칭과 방식도 다양하다. 아우디의 Quattro, BMW의 xDrive, 메르세데스-벤츠 4MATIC, 폭스바겐의 4MOTION,현대자동차의 HTRAC, 닛산의 ATTESA, 혼다의 SH-AWD, 스바루의 SYMMETRICAL AWD, 미니의 ALL4, 마세라티의 Q4, 페라리의 4RM 등 이 밖에도 다양한 명칭이 사용된다. 그 중 대표적으로 아우디, BMW, 벤츠, 닛산, 혼다의 방식을 소개한다.
아우디의 Quattro
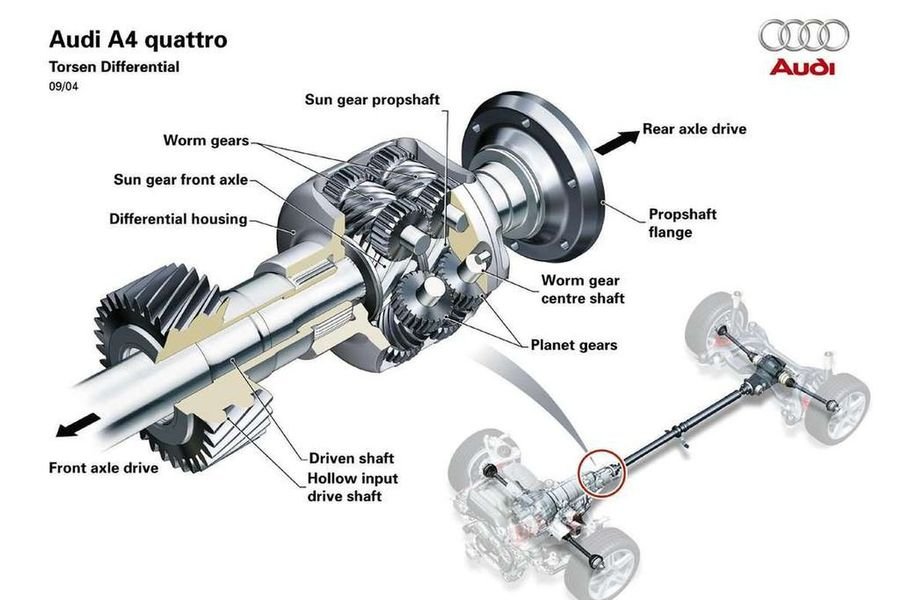

아우디 Quattro 시스템의 대표적인 방식은 토르센 센터 디퍼렌셜(Torsen differential)을 이용한 4륜구동이다. 토르센 디퍼렌셜은 평상시에는 균등한 토크 분배를 하지만 토크 불균형 발생 시 토크 바이어스 비율(torque bias ratio)을 3:1로 분배하여 준다. 바퀴의 회전 반력이 큰 쪽, 즉 다시 말해 접지력이 높은 쪽으로 높은 토크를, 반대로는 낮은 토크를 주어 낮은 접지력의 노면에서도 슬립을 막고 차량의 탈출을 돕는다. 토르센 디퍼렌셜을 이용한 방식은 완전 기계식으로 센서를 이용한 전자식에 비해 리스폰스가 빠르다는 장점이 있다.


6세대부터는 크라운 기어 방식의 센터 디퍼렌셜과 다판 클러치를 이용하여 전자제어를 하는 시스템으로 변경되어 평소에는 전륜:후륜 비율을 40:60으로 유지하고 최대 85:15에서 30:70까지 능동적인 제어가 가능하다. 또한 브레이크를 이용한 전자식 토크 벡터링을 통해 코너링 성능도 끌어올렸다. 이외에도 아우디의 일부 모델에는 할덱스(Haldex)방식의 4륜구동을 적용한 차종도 일부 존재한다.
BMW의 xDrive


BMW의 경우 전자식으로 구현된 4륜구동을 이용한다. 전륜과 후륜에는 오픈 디퍼렌셜이 탑재되고, 중앙에는 다판 클러치 디퍼렌셜이 위치한다. 전륜:후륜 40:60으로 주행을 하는 차량의 각 바퀴에 위치한 센서는 슬립이 일어났는 지의 여부를 메인 시스템에서 모니터링하고 이를 다판 클러치 트랜스퍼에서 반응하여 최대 50:50에서 0:100까지 구동력을 분배한다. 변속기의 뒤에 위치한 다판 클러치 트랜스퍼는 1/1,000초 수준의 반응 속도로 빠르게 동작한다. 이를 통해 전자식 4륜구동의 최대 약점인 반응 속도를 최소화하고 안정적인 주행이 가능하도록 돕는다.

2008년에 등장한 X6부터는 DPC(Dynamic Performance Control) 시스템이 추가되었다. DPC 시스템은 ZF사의 유성기어를 갖추고 디퍼렌셜 내부에서 차량의 좌, 우로의 동력 배분을 수행한다. DPC 시스템 또한 좌륜:우륜 0:100까지의 비율을 구현할 수 있다. 이러한 방식의 토크 벡터링은 브레이크를 이용한 토크 벡터링 시스템에 비해 브레이크의 마모를 줄이고, 제동력을 이용하지 않아 구동력 분배의 폭이 넓다는 장점을 지닌다.
메르세데스-벤츠의 4MATIC


메르세데스-벤츠의 4MATIC은 1985년 등장한 W124 E클래스에 최초로 장착되었다. 후륜구동 기반이였던 4MATIC은 4륜구동의 '4'와 오토매틱 트랜스미션의 'MATIC'에서 따온 이름으로 당시 오토매틱 트랜스미션을 탑재한 차량에서만 선택할 수 있었다. 마그나 슈타이어와 공동 개발한 4륜구동 시스템은 차동기어 잠금기능이 없는 오픈 디퍼렌셜이 탑재되고, 4ETC(Electronic Traction System)과 연동하여 구동된다. 최초의 4MATIC은 레버 조작이 필요한 일시형(Part Time)4륜구동이었다. 4MATIC만의 특징으로는 차량에 탑재된 3개의 ABS채널 중 1개의 ABS라도 급작스러운 조작을 감지하면 자동으로 4륜구동을 해제하여 타이트 코너 브레이킹 현상의 발생을 막는다는 점이다.

W210 E클래스부터 적용된 2세대는 상시 4륜구동으로 변경되었다. 전륜, 중앙, 후륜에는 각 1개의 오픈 디퍼렌셜이 적용되고 4ETC 트랙션 컨트롤 시스템을 이용하여 차동기어 잠금기능을 구현했다. 현재 이용되는 3세대의 경우 2세대 방식에 다판 클러치와 ESP를 추가하여 전륜:후륜의 구동력 배분을 45:55에서 30:70까지 제어한다. ESP는 차량에 설치된 각각의 센서에서 전달된 바퀴의 속도, 각도, 코너링 포스(Cornering Force)등의 정보를 제공 받아 저속에서는 최대 3개의 바퀴를 동시에 제어한다.
닛산의 ATTESA(Advanced Total Traction Engineering System for All-Terrain)


닛산의 ATTESA 시스템은 1987년 닛산 블루버드에 처음 적용되었다. 이때의 ATTESA는 보편적인 4륜구동 방식과 큰 차이가 없었다. 하지만 스카이라인(R32)GT-R과 GTS-4에서 처음 선보인 ATTESA E-TS(Electronic Torque Split)는 세상을 충격에 빠뜨리기에 충분했다. 녹색 지옥 뉘르부르크링을 무려 8:22.38의 기록으로 주파했다. ATTESA E-TS는 습식 다판 클러치, 멀티-로우(Multi-Row)체인이 탑재되어 유압에 의해 구동력이 변동되는 시스템을 탑재했다. 동작 과정에서 일반적인 기성 오일은 열과 압력을 견디지 못하여 NS-ATF(Nissan Special Automatic Transmission Fluid)라는 전용 오일도 개발했고, 오일펌프를 위한 냉각장치도 개발되었다. 구동력 배분을 위한 시스템은 당시에는 흔치 않던 16비트 사양이 탑재되어 초당 10회의 움직임을 분석하고 구동력을 배분할 수 있었다. 평소 전륜에는 0~5%의 구동력이 전달되지만 차량이 슬립하는 것을 감지하면 최대 50%의 구동력을 전륜으로 보낼 수 있다. ATTESA E-TS는 당시 포르쉐 959의 시스템과 유사했는데, 두 차량의 가격이 큰 차이를 보이기 때문에 닛산의 기술력이 앞 섰다고 평가 할 수 있다.


BCNR33 스카이라인 GT-R에 탑재된 ATTESA ET-S는 'PRO'라는 이름이 추가되며 후륜에 능동형 LSD(Limited Slip Differential)을 추가하여 토크 벡터링을 지원하기 시작했다. 또 메인 시스템의 처리 성능도 개선되어 초당 100회의 가속도 센서, 스로틀 센서, 과급압, 휠 속도 등의 정보를 모니터링하고 구동력을 배분한다. 다만 능동형 LSD의 경우 고가였기 때문에 옵션으로 제공되었다. BNR34 스카이라인 GT-R에서는 능동형 LSD가 기본으로 탑재되었다. BCNR33 당시의 시스템과 같지만 시스템의 전반적인 처리 성능이 향상되어 초당 1,000회의 모니터링 성능을 보여주었다.



스카이라인의 이름이 붙지않는 현재의 GT-R에 탑재된 4륜구동 시스템도 동일한 ATTESA E-TS PRO라는 이름이 붙지만 구조와 동작은 전혀 다르다. 전자 센서에 의해 감지된 상황에 따라 가장 이상적인 주행을 구사하는 것이 현행 ATTESA의 가장 큰 특징이다. 특히 요(Yaw)를 감지하는 센서를 통해 차량의 슬립과 코너링을 정밀하게 감지하고 최상의 주행을 구현했다. 닛산의 ATTESA는 닛산의 전륜구동 차량들과 인피니티의 차량들에도 적용된다. 인피니티의 경우 능동형 LSD가 제거되고 전자식 브레이크가 대신 토크 벡터링을 구현하며 오토, 스포츠, 에코, 스노우의 주행 모드를 지원하는 것이 차이점이다. ATTESA에 얽힌 한 가지 재미난 이야기는 포르쉐에서 판매한 959 중 단 1대의 차량의 행방이 묘연했고, 알고보니 닛산에서 BNR32를 개발할 당시 포르쉐 959를 연구개발 목적으로 구매하여 완전 분해하여 연구소에 보관했기 때문이었다. 포르쉐 타도를 외쳤던 닛산의 집념이 어느 정도였는지 확인할 수 있는 대목이기도 하다.
혼다의 SH-AWD(Super Handling-All Wheel Drive)


혼다는 2004년 선보인 플래그쉽 세단 4세대 레전드(KB1)에 혼다만의 독특한 4륜구동 시스템을 선보였다. '슈퍼 핸들링'이라는 이름이 붙은 4륜구동 시스템은 당시 혼다의 기술력을 보여준 결정체였다. 대부분의 4륜구동 시스템은 전/후 구동력 배분이 전부였지만 혼다의 SH-AWD는 상시 4륜구동이면서 후륜의 한 쪽 바퀴에만 동력을 몰아 줄 수도 있었다. 즉, 당시 기준으로는 최초로 전/후/좌/우 자유자제로 구동력을 배분하고 코너링 시에는 외측 후륜에 더 많은 구동력을 주어 토크 벡터링을 구현한 4륜구동이었다. 이는 벡터 방식의 구동력 배분 시스템을 가진 세계 최초의 자동차였다. 전륜:후륜의 경우 70:30에서 30:70까지 연속적으로 분배할 수 있고 후륜에서 필요한 경우 한 쪽 바퀴에 후륜으로 분배된 토크의 100%를 사용 가능하다. 따라서 급 가속 시 전륜:후륜을 60:40까지 만들었다가 직후 급격한 조향 시 40의 동력을 한 쪽 후륜에 몰아주어 언더스티어가 최소화되고 차량의 균형을 유지한다. 이 밖에도 4채널의 ABS와 VSA(Vehicle Stability Assist), 전자식 브레이크 답력 분배(EBD), 스로틀 제어 시스템, 요(Yaw) 앵글 센서, 스피드 센서, 스티어링 앵글 센서, 측면 G-Force 센서가 SH-AWD와 함께 동작하여 정밀한 주행을 돕는다. 때문에 동급 대비 우수한 코너링 성능과 높은 노면 추종성을 가진 자동차였다. SH-AWD는 당시 엄청난 센세이션을 몰고 왔으며 과학 매거진인 Popular Science지에서 2004년 최고의 자동차 혁신으로 선정되었고, 2005년에는 CNET 2005년 올해의 Tech Car에 선정되었으며, 2004년부터 2005년 2년간 일본 올해의 자동차(JCOTY)를 수상하기도 했다.


현행 레전드(KC2)에 탑재되는 SH-AWD는 '슈퍼 핸들링'이 아닌 '스포츠 하이브리드'라는 이름을 가진다. 이는 전륜에는 내연기관의 동력으로, 후륜에는 전기 모터로 구동하는 주문형(On-Demend) 4륜구동 시스템으로 전륜과 후륜 사이에는 물리적인 힘을 전달하는 구동축이 존재하지 않는다. 전기 모터의 특성을 이용하여 이전 세대(KB1)에서 보여주었던 토크 벡터링을 구현해 놓은 점도 특징 중 하나이다.



4바퀴를 굴려 얻는 점과 잃는 점
그렇다면 4륜구동의 장단점은 무엇일까? 우선 장점으로는 우수한 주행성과 안정성이 있다. 본래 태초에는 험로 주행이나 미끄러운 노면 등 주행을 위해 탄생했으나 현재에 이르러서는 포장도로에서의 고속 주행과 스포츠 주행을 위해 쓰이는 비중이 높다. 트랙션이 높아 그립 주행에 강하기 때문에 스포츠카, 슈퍼카, 레이스카에서도 4륜구동이 적용되는 비중이 커지는 추세이기도 하다. 또한 과거 4륜구동이 가지던 단점도 전자제어로 능동적인 대처가 가능해지면서 줄어들어 잃는 것보다는 얻는 것이 큰 편이다.

하지만 구동 축이 증가하고 기구물이 증가함에 따라 필연적으로 발생하는 동력 손실, 2륜구동에 비해 상대적으로는 낮을 수 밖에 없는 연비, 앞 쪽 엔진 4륜구동의 경우 프론트 헤비로 인한 언더스티어 성향 등 물리적으로 발생하는 단점은 여전히 해결 과제이다. 또한 앞 서 이야기한 타이트 브레이킹 현상도 4륜구동 자동차를 운전하는 운전자라면 주의해야 할 사항이다. 그 밖에도 견인 시 4개의 바퀴를 모두 견인해야 하므로 돌리(Dolly)를 이용하거나 플랫베드형식의 견인차(Flatbed Tow Truck)를 이용해야 하고, 4바퀴를 모두 굴리기 때문에 타이어 등의 소모품도 상대적으로 비용이 더 발생하고 고장 수리 시에도 부품의 가격이 고가인 경우가 많다. 장점도 단점도 명확하지만 특유의 매력이 넘치는 4륜구동은 오늘도 도로 위를 누비고 있다.
글: 이동현 에디터(yaya7070@naver.com)
사진: Ssangyong, Porsche, Spyker, Daimler, Wekipedia, Jeep, Dodge, Subaru, Genesis, Hyundai WIA,
Hyundai, Acura, Maserati, Ferrari, Audi, BMW, Mercedes-Benz, Nissan, Honda, Toyota
이동현 포토그래퍼(yaya7070@naver.com)
카테고리: 자동차 원리 이야기
©오토모빌매거진. 무단-전재 재배포 금지
네이버 인플루언서 페이지에서도 '오토모빌매거진'을 만나보세요!

반응형
 Copyright © rollingmagazine 2024
Copyright © rollingmagazine 2024
댓글 영역